
https://doi.org/10.36246/UL.2023.2.04
2023; 11. évfolyam, 18. szám
Bevezető
Az útpályaszerkezetek állapotának felmérésére a gyakorlatban két fő vizsgálati módszert különböztetünk meg: a roncsolásost és a roncsolásmentest.
A roncsolásos vizsgálatok fúrt vagy kivágott mintákkal dolgoznak, azok laboratóriumi vizsgálatát értjük rajtuk. Ezek a módszerek pontos eredményeket adnak, gondoljunk csak a vastagságmérésre, mégis számos hátránnyal jár alkalmazásuk. Ilyen például a pályaszerkezetben okozott szerkezeti kár, vagy a valós idejű mérés lehetetlensége, valamint a mintavételek gyakran forgalmi zavarokat is keltenek. Ennek fényében érthető, hogy manapság a helyszíni útállapotértékeléseknél a roncsolásmentes vizsgálatokat részesítik előnyben, mivel gyorsan és zavarásmentesen lehet nagymennyiségű mérést úgy végrehajtani, hogy közben nem okozunk kárt a vizsgált szerkezetben.
Az útpályaszerkezet diagnosztikában alkalmazható roncsolásmentes vizsgálatok részletes áttekintése megtalálható [1] munkájában. Az ott felsorolt eszközök és eljárások közül, mi most csak az ejtősúlyos behajlásmérő berendezéssel (Falling Weight Deflectometer, FWD) és a földradar (Ground-Penetrating Radar, GPR) méréstechnológiával foglalkozunk. Hagyományosan az FWD berendezéssel a kialakuló alakváltozások alapján a szerkezeti teherbírást, a földradarral pedig elsősorban az útpályaszerkezetet felépítő rétegek vastagságát határozzuk meg. Ennek a két vizsgálatnak a kombinálása lehetővé teszi, hogy a földradarral mért rétegvastagságokhoz teherbírási modulusértékeket rendeljünk [2]. A teherbírási adatok alapján pedig már elvégezhető az útburkolat állapotának minősítése és rangsorolása, amelyet később a karbantartási, illetve felújítási stratégia kidolgozásához is felhasználhatunk.
A gyakorlatban viszont nem mindig áll egyidejűleg rendelkezésre mind a két méréstechnika. Így a lokális pontokban 20-25 méterenként az FWD berendezéssel mért behajlásadatok térbeli kiterjesztése egyáltalán nem egyértelmű és könnyű feladat. Borecky et al. (2019) [3] kimutatták, hogy az FWD és GPR berendezések eredményei és a tesztpályák mechanikai tulajdonságai korrelálnak egymással. Erős regressziós kapcsolatot találtak egy adott szelvényben a GPR visszavert jelek átlagos amplitúdója és az FWD központi behajlás között, a korrelációs együttható 0,67 és 0,94 között változott a tanulmányban. Ez alapján feltételezhető, hogy az FWD berendezés nem csak a rétegmerevségek, hanem a rétegvastagságok meghatározására is alkalmas lehet, továbbá a folytonos GPR rétegvastagságokkal (mint segédváltozóval) a lokális teherbírásadatok is kiterjeszthetők az út minden szelvényére. Jelen cikkben elsődleges célja annak megvizsgálása, hogy az FWD és GPR berendezések szoros integrációjának milyen jelenlegi és jövőbeni lehetőségei vannak a földműteherbírás és a rétegvastagságok szempontjából.
Ejtősúlyos behajlásmérő berendezés (FWD)
A gyakorlatban az impulzussal operáló behajlásmérő berendezések általában egy lökéscsillapítóval ellátott tárcsára – a helyzeti energia felhasználásával – adott magasságból adott tömeget ejtenek le. Az útpályára ható terhelési impulzus rugalmas alakváltozásokból álló, a terhelési centrumból kiinduló „hullámfrontot” eredményez. A függőleges elmozdulások maximális értékeit a terhelési lemez közepén és több, a terhelési centrumtól sugár irányban elhelyezett érzékelőkkel rögzítik. Ezek a behajlások a terhelési impulzus függvényében jellemzik a pályaszerkezet szerkezeti szilárdságát. A mérés közben rögzített behajlási teknő lényegesen több információt szolgáltat a pályaszerkezet pillanatnyi állapotáról, mint a központi behajlás, így pontosabban határozható meg annak teherbírása, hátralévő élettartalma és az esetlegesen szükséges erősítőréteg vastagsága (1. ábra).
 |
Az ejtősúlyos behajlásmérő berendezés mérési eredményét kiegészítve a pályaszerkezet felépítésének adataival (rétegek típusa és vastagsága), alkalmazható valamilyen „backalculation” eljárás, amivel a pályaszerkezeti rétegek teherbírási modulusát a mérési adatokból vissza lehet számolni. A visszaszámoláson alapuló eljárások általában a többrétegű pályaszerkezetekre kidolgozott mechanikai számítási módszereket alkalmazva, az ismert adatokból kiindulva, iterációs eljárással határozzák meg a mért lehajlásvonalat legjobban megközelítő pályaszerkezeti jellemzőket. A módszer egyik fő hátránya, hogy a szerkezetből fúrással szükséges mintát venni a rétegfelépítés meghatározásához.
Az FWD adatok másik feldolgozási lehetősége a behajlási teknőparaméterek alkalmazása. Ez azon a megfigyelésen alapul, hogy a terhelési tengelytől jellegzetes távolságra mért elmozdulások különbsége közvetlenül jellemzi az adott mélységi tartományban lévő szerkezeti rétegek merevségét [4]. Az aszfaltburkolatok jellemzésére a felszíni görbületi index (Surface Curvature Index, SCI) terjedt el, amit a terheléshez közeli \( D_{0}-D_{300} \) elmozdulásokból számítunk (1. ábra). Az alaprétegek szerkezeti jellemzésére az alap károsodási index (Base Damage Index, BDI) használatos, ami a \( D_{300}-D_{600} \) behajlások különbsége. Az alap görbületi indexek (Base Curvature Indices, BCI) jól használhatóak ( \( D_{600}-D_{900} \) ) az alap alatti rétegek és a teherhordó altalaj elemzésére. Az SCI, BDI és BCI indexek növekedése minden esetben az adott rétegcsoport gyengülésére utal.
Földradar (GPR)
A földradar műszer jellemzően egy adó és egy vevő antennából, egy adatgyűjtő és vezérlő egységből, egy mérőkerékből és opcionálisan egy GPS-ből áll (2. ábra). A földradar adó része nagyfrekvenciás elektromágneses impulzusok sorozatát bocsátja ki. A hullámok a vizsgált közegben részben elnyelődnek, részben visszaverődnek. A visszaérkező jelet (feszültséget) a vevő egység veszi az idő függvényében, digitalizálja és az adatrögzítő egység tárolja. A radarjel terjedése a vizsgált közeg elektromos tulajdonságaitól függ. Ezek közül a két legjellemzőbb, a dielektromos állandó (permittivitás) és a vezetőképesség (konduktancia). Az aszfaltrétegek helyszíni relatív dielektromos állandóját megkapjuk a felületi visszaverődés módszerét (a fémlemez kalibrációt) alkalmazva [5]. A relatív \( \varepsilon_r \) dielektromos állandó ismeretében pedig már lehetőség nyílik egy adott réteg vastagságának kiszámítására (3. ábra):
\[ h_i=\frac{c\Delta t_i}{\sqrt{\varepsilon_r}} \]
ahol c a fénysebesség (0,30 m/ns), \( \Delta t_{i} \) az \( A_{1} \) és \( A_{2} \) amplitúdók közötti idő, és \( \varepsilon_r \) az anyag relatív dielektromos állandója. Így a radarmérés időtengelye mélységmetszetté alakítható.
 |
 |
A rétegvastagságok és rétegmodulusok közvetlen FWD mérésekből történő meghatározásának elméleti háttere
Noureldin (1992; 2005) [6, 7, 8] egyszerűsített módszert dolgozott ki az útpályaszerkezeti rétegmodulusok és rétegvastagságok közvetlen meghatározására az FWD mérésekből. Eljárásának lényege, hogy létezik az útburkolat felszínén egy olyan egyedi mérési pont, ami a terhelés középpontjától \( r_{x} \) sugárirányú távolságban van, és ahol a \( D_{x} \) alakváltozás pontosan megegyezik a földmű alakváltozásával (4. ábra):
\[ D_x=D\left(r_x,0\right)\approx D\left(r_x,H\right) \]
Ha ezt az egyedi helyet megtaláljuk, akkor lehetőség nyílik a földmű és a pályaszerkezet modulusának visszaszámítására, és a teljes pályaszerkezetvastagság becslésére. Morgan és Scala (1965) [9] módosított Benkelman-gerendával kísérleti útszakaszokon mért útburkolat és földmű behajlásadatai alapján (5. ábra) jogosan tételezhető fel ennek a pontnak a létezése. A teljes pályaszerkezetvastagságot Noureldin és Sharaf (1992) [6] az alábbi összefüggéssel javasolta számításba venni:
\[ H={0,5\left[\frac{D_0-D_x}{D_x\left(\frac{r_x}{76,22}-1\right)}\right]}^{1/3}\bullet\left(4r_x^2-23225,76\right)^{1/2} \]
ahol \( D_{0} \), \(D_{x} \), \( r_{x} \) és H mm-ben vannak értelmezve. A fenti egyenlet a kétrétegű útpályaszerkezetek [10, 11] megoldásain, valamint [12] egyenértékvastagság fogalmán alapul [6]. A számításhoz szükséges egyedi \( r_x \) mérési hely visszaszámítható, ha rendelkezésre állnak megbízható vastagsági adatok. Minden a terhelés tengelyén kívül mért behajlásadathoz tartozik egy H vastagságérték a (3) összefüggés szerint, ezek közül a forgatókönyvek közül nekünk pedig az felel meg, ami egybevág a fúrásokkal feltárt vastagságadatokkal.Arra az esetre amikor nem áll rendelkezésünkre vastagsági adat, [6] a következőt javasolja. Ábrázoljuk az FWD mérések \( r_xD_x \) szorzatát a terhelés középpontjától \( r_x \) sugárirányú távolságokban, majd megkeressük ennek a görbének a maximumát (6. ábra).
 |
 |
Az így meghatározott távolságot kell behelyettesíteni a (3) egyenletbe. Az elgondolás mechanikai alapját Boussinesq homogén végtelen féltérre kidolgozott egyenletei adják:
\[ E_c=2\frac{\left(1-\mu^2\right)qa}{D_0}\ \ \ ha\ r<0,25a \]
\[ E_c=C\frac{\left(1-\mu^2\right)qa^2}{r_xD_x}\ ha\ r>0,25a \]
ahol \( E_{c} \) kompozit modulus, q kontakt feszültség, a terhelő tárcsa sugara, \( \mu \) a földmű Poisson-féle tényezője, \( D_x \) a mért behajlások a terhelés tengelytől \( r_{x} \) sugárirányú távolságokban, C alakváltozási állandó. Boussinesq koncentrált erőre kidolgozott (5) képlete alapján a homogén végtelen féltér felszíni elmozdulása fordítottan arányos a terheléstől mért távolsággal, ezért az E_c kompozit modulus ott lesz a legkisebb, ahol az \( r_{x}D_{x} \) szorzat a legnagyobb (7. ábra). Mivel a teljes H rétegvastagság definíció szerint a térszíntől a legkisebb teherbírású rétegig tart, a továbbiakban azt is feltételezzük, hogy a legalsó földműréteg teherbírása a legkisebb, így azt jól közelíthetjük az \( r_{x}D_{x} \) helyen számolt kompozit modulussal:
\[ E_{sg}\approx E_c\left(r_x{,D}_x\right) \]
Abban az esetben, ha nincsen egyértelmű maximuma az \( r_{x}D_{x} \) görbének (lásd 2 típus 6-7. ábrákon), akkor a helyszíni fúrásokból, földradar szelvényekből vagy az útnyilvántartási rendszerek vastagság adataiból számolhatjuk vissza a keresett radiális távolságot.Az AASHTO (1993) [14] útmutató függeléke tartalmaz egy algoritmust az \( E_{sg} \) földműmodulusnak és a teljes útpályaszerkezet \( E_{op} \) egyenértékű modulusának meghatározására. A földmű modulust a=150 mm, \( q=F/{\pi a}^2 \) és \( \mu=0,5 \) Poisson-féle tényező behelyettesítése után Boussinesq (5) képletével javasolja azt számítani:
\[ E_{sg}=\frac{112,5F}{r_xD_x} \]
Többrétegű pályaszerkezetmodellek adatait kielemezve \( r_{x} \) értékre a következő kritériumot fogalmazták meg:
\[ r_x\geq0,7a_e \]
ahol
\( a_{e} \) az ún. effektív sugár.
 |
 |
Az effektív sugár nem más, mint a terhelő tárcsáról kiinduló feszültségkúp metszéspontja a földműszinttel, amit a helyettesítő rétegvastagságok elmélete alapján az alábbi képlettel tudunk közelíteni:
\[ a_e=\sqrt{\left[a^2+\left(H\sqrt[3]{\frac{E_{op}}{E_{sg}}}\right)^2\right]} \]
Az effektív sugárhoz szükséges \( E_{op} \) modulust visszaszámolhatjuk a \( D_{o} \) központi behajlásból, az \( E_{sg} \) földműmodulus és a teljes H pályaszerkezetvastagság behelyettesítésével a (10) összefüggésbe:
\[ D_o=1,5qa\left\{\frac{1}{E_{sg}\sqrt{1+\left(\frac{H}{a}\sqrt[3]{\frac{E_{op}}{E_{sg}}}\right)^2}}+\frac{1-\frac{1}{\sqrt{1+\left(\frac{H}{a}\right)^2}}}{E_{op}}\right\} \]
A (7-8-9-10) összefüggések bírtokában a számítás algoritmusa már összeállítható. Az FWD berendezés \( r_x \) és \( {\ D}_x \) adatait egymás után behelyettesítjük a (7) összefüggésbe, és kiszámítjuk az \( E_{sg} \) földműteherbírást az aktuális szenzorpozícióhoz. A tárcsaközép \( D_o \) süllyedés hőmérséklet korrekcióját követően, a teljes H pályaszerkezetvastagság és az \( E_{sg} \) földműmodulus felhasználásával a (10) egyenletből megkapjuk \( E_{op} \) értékét. Az effektív sugarat (9) alapján meghatározzuk. Végül ellenőrizzük (8) kritérium teljesülését. Ha a kritérium teljesül, a számításnak vége, ha nem, akkor a következő szenzor adataival újrakezdjük a folyamatot. Annak ellenére, hogy az AASHTO (1993) [14] eljárás nem alkalmas közvetlenül az útpályaszerkezet teljes H vastagságának visszaszámítására a behajlásadatokból, mégis célszerűnek láttuk azt ismertetni, mivel útmutatást ad \( r_x \) távolság értelmezéséhez és meghatározásához.Noureldin (1992) [7] megállapításait, kicsivel később Sun, Hachiya, & Yao (1995) [15] megerősítette, amikor is kétrétegű betonútpályaszerkezetek rétegmodulusainak visszaszámításakor felfedezték, hogy létezik egy pont a behajlási teknőn, amelynek a behajlásértéke nem függ a felső burkolati réteg modulusától.
 |
 |
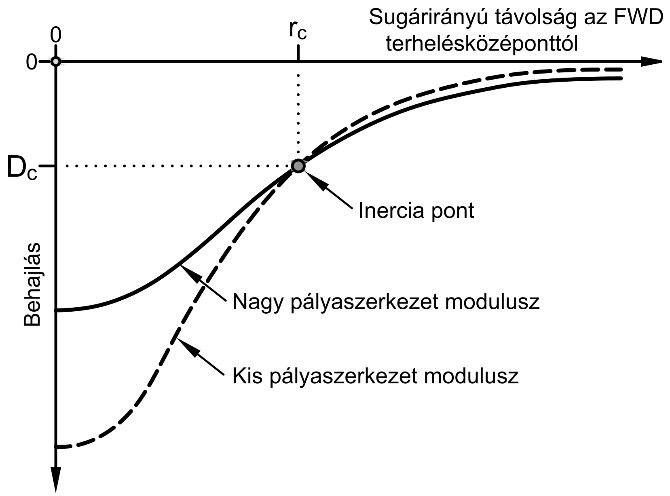
A pont invarianciájára tekintettel ezt a nevezetes pontot inercia pontnak nevezték el. Erre az eredménye úgy jutottak, hogy számos kétrétegű szerkezet behajlási vonalát kiszámították. A szerkezetek azonos földmű teherbírással és burkolatvastagsággal rendelkeztek, csak a felső burkolati réteg modulusában tértek el egymástól. Intuitív módon belátható, hogy a magasabb felső burkolati rétegmodulus laposabb, míg az alacsonyabb felső burkolati rétegmodulus meredekebb lefutású behajlási teknőt eredményez ugyanazon a földművön. A terhelés tengelyétől távolodva ezért kell lennie egy olyan területnek, ahol az összes behajlási teknő metszi egymást. Ha ez a terület elég kicsi ahhoz, hogy megközelítőleg pontként kezeljük, akkor a fent említett inercia ponthoz jutunk (lásd 8. ábra). Az inercia pont sugárirányú \( r_{c} \) helyzetét és az ott fellépő \( D_{c} \) behajlás nagyságát korrelációszámítással kapcsolatba hozták a földmű \( E_{sg} \) teherbírásával és a burkolat teljes H vastagságával (9. ábra):
\[ r_c=f\left(H,E_{sg}\right) \]
\[ D_c=f\left(H,E_{sg}\right) \]
Az inercia pont hasznosnak bizonyult a rétegmodulusok visszaszámításakor, mivel mindig egyértelmű megoldást adott a rá épülő eljárás. A módszert végül Zhang és Sun (2004) [17] majd Zang, Sun, és Chen (2017) [18] kiterjesztette a háromrétegű hajlékony útpályaszerkezetekre is. Noureldin & Sharaf (1992) [7] által feltételezett egyedi mérési hely (\( r_{x} \) és \( D_{x} \)) , jó közelítéssel megfeleltethető az inercia pontnak, ezért mi is így hivatkozunk rá:
\[ r_x\approx r_c\ és Dx≈Dc \]
A teljes pályaszerkezetvastagság meghatározását követően [8] megkíséreltek a felső aszfaltrétegek \( h_{AC} \) összvastagságát is megbecsülni, a következő tapasztalati képletet dolgozták ki:
\[ h_{AC}=590,24(\frac{D_{0}-D_{300}}{{3D}_{300}})^{1/3} \]
ahol \( D_{0} \) a központi behajlás, \( D_{300} \) pedig a 300 mm-re lévő érzékelő elmozdulása mm-ben. Hasonló eredményeket találunk [19] munkájában, akik korrelációt keresetek és találtak az aszfaltrétegek \( h_{AC} \) összvastagságát és az FWD készülék behajlási teknőparaméterei (SCI és BDI indexek) között:
\[ h_{AC}=\frac{a+BDI}{b+c\bullet S C I}+\frac{d}{SCI} \]
ahol a, b, c és d regressziós együtthatók. A tanulmányban bemutatott \( h_{AC}=f\left(SCI;BDI\right) \) nemlineáris függvénykapcsolat azt sugallja, hogy egy adott homogén útszakaszon belül az FWD berendezéssel rögzített szerkezeti válaszokból, a deformációkból vissza lehet következtetni az aszfaltrétegek \( h_{AC} \) összvastagságára.Saltan és Terzi (2004) [20] sikeresen alkalmazta a neurális hálókat a rétegvastagságok és a rétegmodulusok visszaszámítására a mért behajlásokból. Később Terzi et al. (2013) [21] többféle adatbányászati technikát is kipróbált, hogy a szerkezet behajlásából a felső aszfaltburkolat vastagságára tudjon következtetni. Vizsgálataikban a pályaszerkezet modellek felső aszfaltburkolat vastagsága csak 4-9 cm között változott. A legjobb eredményeket a KStar (K*) osztályozó és a neurális hálók adták, így ezek a módszerek javasoltak az FWD behajlások feldolgozására. Tovább erősíti ezt az elgondolást [22] munkája, ahol sikerült olyan neurális hálót felépíteni és betanítani az FWD készülék mérései alapján (max. erő, max. elmozdulás, időeltolódás az erő és az elmozdulás között, hullámterjedési sebesség a szenzoroknál és a felületi hőmérséklet), amivel nagypontossággal vissza lehetet számolni az aszfaltrétegek és az alaprétegek vastagságát.Összefoglalva megállapítható a korábbi kutatások alapján, hogy az elvi lehetőség meg van arra, hogy az FWD mérésekből a vizsgált útpályaszerkezet rétegvastagságait visszaszámítsuk. Erre a célra a legalkalmasabb eszköznek pedig a manapság széles körben elterjedt gépi tanulási módszerek látszanak a hagyományos regressziószámítás mellett.
Anyag és módszer
Az inercia pontok meghatározásához első lépésként felépítettünk egy szintetikus adatbázist lineárisan rugalmas háromrétegű pályaszerkezetmodellekből (10. ábra). Mindegyik modell egy \( h_{1} \) vastagságú burkolati rétegből és egy \( h_{2} \) vastagságú alaprétegből, és az azokat alátámasztó végtelen kiterjedésű rugalmas féltérből állt. Minden réteg egymáshoz szorosan tapadt, és a rétegek mechanikai viselkedése csak a Young-modulustól és a Poisson-tényezőtől függött. A rétegvastagságok és az anyagparaméterek terjedelmét az 1. táblázat mutatja be.
 |
 |
| Paraméter | Tartomány | Növekmény | Eset |
| 1. rétegmodulus [E1, MPa] | 1000–8000 | 1000 | 8 |
| 2. rétegmodulus [E2, MPa] | 100–900 | 100 | 9 |
| 3. rétegmodulus [E3, MPa] | 25–250 | 25 | 10 |
| 1. rétegvastagság [h1, mm] | 50–250 | 50 | 5 |
| 2. rétegvastagság [h2, mm] | 100–400 | 50 | 7 |
Összesen 8×9×10×5×7 = 25 200 db pályaszerkezetet generáltunk. A modellek kerékterhelés hatására ébredő reakcióinak meghatározásához [23] aszfaltburkolatok tervezésére és elemzésére MATLAB környezetben kifejlesztett Adaptive Layered Viscoelastic Analysis (ALVA) programcsomagját használtuk. A burkolat behajlási vonalát az FWD berendezések jellemző szenzorkiosztása alapján a terhelés tengelyétől 0, 150, 200, 300, 450, 600, 900, 1200, 1500 és 1800 mm-re kiszámítottuk. Ezt követően függvényt illesztettük az elmozdulásokra, mivel a valóságban az FWD berendezések méréseit sokszor szükséges extrapolálni:
\[ D\left(r\right)=\frac{D_04a^2}{\left(\alpha r\right)^\beta+4a^2} \]
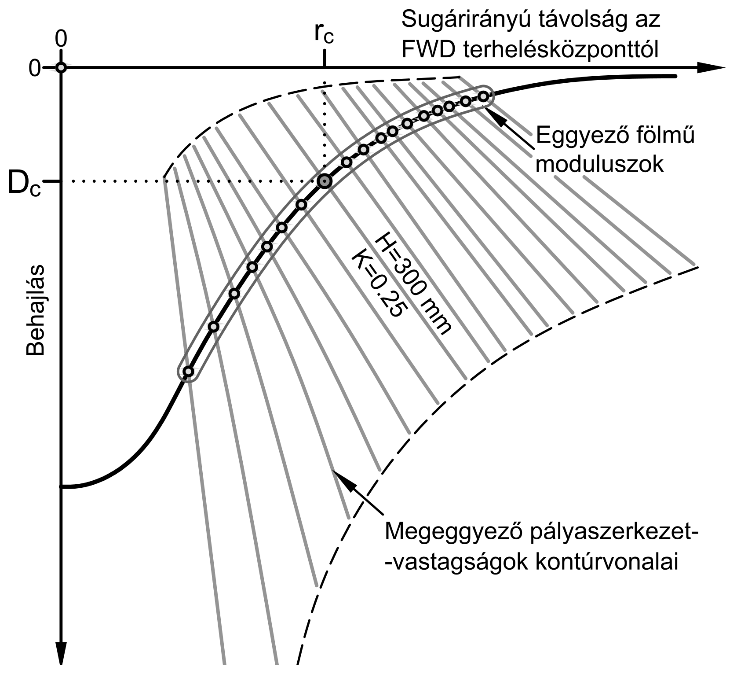
ahol \( D_{0} \) a maximális behajlás, az FWD terhelő tárcsa a sugara, sugárirányú r távolság, végül \( \alpha \) és \( \beta \) alaktényezők [24]. A továbbiakban a fenti függvénnyel közelített behajlásokkal dolgoztunk, hogy kiküszöböljük a későbbi függvényillesztés szisztematikus hibáját.A függvényillesztés után kapott behajlási vonalakat a földműteherbírás és a rétegvastagságok alapján elkülönített 10×5×7 = 350 csoport egyikébe soroltuk. Minden csoportba 8×9 = 72 db pályaszerkezet került az 1. és 2. rétegmodulus alapján. A szerkezetek behajlási vonalát ezután kirajzolva, az egymást metsző görbék kiadták a keresett inercia pontot (11. ábra). Numerikusan megfogalmazva, a terhelés tengelyétől távolodva azt a sugárirányú \( r_{c} \) távolságot kerestük, ahol a behajlások szórása a legkisebb volt. Ehhez az \( r_{c} \) helyhez tartozó behajlások átlaga megadta \( D_{c} \) értékét. Fontos megjegyeznünk, hogy mivel az inercia pontok meghatározásához nem közvetlenül az ALVA programmal számolt elmozdulásokat, hanem csak azok közelítő függvényértékeket használtuk, ezeket a pontokat helyesebb [18] munkája után virtuális inercia pontoknak nevezni.A virtuális inerciapont helyzete pontosan meghatározható az FWD által mért behajlási adatokból, ha a szerkezet H vastagsága ismert. Ez esetben az ismeretlen \( E_{sg} \) földműmodulust addig változtatjuk, amíg az (11,12) képletekkel számolt \( r_c \) és \( D_c \) koordinátájú pont a legkisebb hibával meg nem közelíti a mért behajlási teknőt. A számítás pontos menetét megtaláljuk Zang, Sun, és Chen (2017) munkájában. Fordított esetben viszont, amikor a szerkezet H vastagsága az ismeretlen, hiába tudjuk az \( E_{sg} \) földmű modulus pontos értékét, mégsem kapunk egyértelmű megoldást. Ennek oka az, hogy a behajlási teknő minden pontjához más és más vastagságértékek tartoznak. Ezt jól lehet szemléltetni, ha az inerciapontok rendszerében ábrázoljuk az FWD adatokat.A 12. ábra alapján beláthatjuk, hogy a rétegvastagságokat csak akkor tudjuk visszaszámítani, ha ismerjük az inercia pont pontos helyzetét.
 |
A levezetett 350 db virtuális inerciapont és az útpályaszerkezet paraméterek kapcsolatának leírásához a Gauss-folyamat regressziót (Gaussian Process Regression, GPR) választottuk, amely a gépi tanulás területen széles körben elterjedt módszer. Az eljárás lényege röviden, hogy az \( \mathbf{y}=\left\{y_1,…,y_n\right\} \) megfigyelésekre úgy tekintünk, mintha azok egy többváltozós Gauss-eloszlás mintaelemei lennének. Visszafelé gondolkodva, ezekhez az \( f\left(\mathbf{x}\right) \) elemekhez hozzá tudunk rendelni egy Gauss-folyamatot:
\[ f\left(\mathbf{x}\right)~GP\left(m\left(\mathbf{x}\right),k\left(\mathbf{x},\mathbf{x}^\prime\right)\right) \]
A Gauss-folyamatot egyértelműen meghatározza az \( m\left(\mathbf{x}\right) \) várható-érték függvény és a \( k\left(\mathbf{x},\mathbf{x}\prime\right) \) kovarianciafüggvény (amit sokszor kernel-függvénynek is neveznek). A GPR-módszer pontos terminológiája, fejlesztésének és alkalmazásának részletei megtalálhatóak [25] és [26] munkáiban. A módszer részletes ismertetése nem célja ennek a tanulmánynak.Az általunk összeállított tanítóadathalmazra a GPR-modellt ugyancsak a MATLAB R2021a verziójával, annak „fitgpr” függvényével illesztettük. A 350 db virtuális inerciapont alapján a tanító adathalmaz kis méretű, ezért a k-fold cross-validation módszert választottuk a modellek megfelelőségének igazolására (vagyis az overfitting elkerülésére). Lényege, hogy a tanító adathalmazt felosztjuk k részre, és ezekből egy „fold” lesz a validációs adathalmaz. A cross-validation k ilyen iteráció után befejeződik, ahol mindegyik „fold” pontosan egyszer volt felhasználva validációs adathalmazként. A modell jóságát mérő metrikák becslése a k db eredmény átlagolásával történik. A k-fold módszer előnye, hogy a tanító adathalmaz minden pontját felhasználjuk tanításra és validációra is.A szintetikus adatbázison alapuló 350 db inercia pont feldolgozásakor azt tapasztaltuk, hogy az inerciapont \( r_c \) és \( D_c \) koordinátája a \( h_{1} \) és \( h_{2} \) rétegvastagságoknak és azok \( K=h_1/h_2 \) arányának függvénye. Vagyis mi nem tudtuk igazolni [18] azon megállapítását, miszerint egy háromrétegű szerkezet viselkedése jól közelíthető egy olyan kétrétegű modellel, amelynek felső összevont H burkolatvastagsága megegyezik \( h_{1} \) és \( h_{2} \) összegével. Ezt jól demonstrálják a 2. táblázatban bemutatott példaszámítások is. Eredményeink alapján az inercia pont nemcsak az \( E_{sg} \) földműteherbírástól és a teljes H rétegvastagságtól, hanem még a rétegek K vastagsági arányától is függ.
| Esg [MPa] | h1 [mm] | h2 [mm] | rc [mm] | Dc [mm] | K [-] | H [mm] |
| 50 | 100 | 200 | 980. | 0,2886 | 0,50 | 300 |
| 50 | 200 | 100 | 1186 | 0,2450 | 2,00 | 300 |
| 50 | 150 | 250 | 1277 | 0,2227 | 0,60 | 400 |
| 50 | 250 | 150 | 1568 | 0,1889 | 1,67 | 400 |
Ezért továbbiakban a virtuális inerciapontok és a pályaszerkezetjellemzők között az alábbi kapcsolatot kerestük Gauss-folyamat regresszióval:
\[ H=GP\left(r_c,D_c,K,E_{sg}\right) \]
A GPR-modell validálásához k=5 részhalmazra osztottuk fel az adathalmazt. A MATLAB programmal meghatároztuk a Gauss-folyamat modell paramétereit és jellemzőit, és azokat az 3. táblázatban foglaltuk össze.
| Optimalizált hiperparaméterek | Training Results |
| Basis function: Linear | RMSE (Validation): 1.876 |
| Kernel function: Nonisotropic Rational Quadratic | R-Squared (Validation): 1.00 |
| Kernel scale: 2.174 | MSE (Validation): 3.5192 |
| Signal standard deviation: 86.7265 | MAE (Validation): 1.0127 |
| Sigma: 0.00010219 | Prediction speed: ~21000 obs/sec |
| Standardize: true | Training time: 132.93 sec |
A kifejlesztett Gauss-folyamat regressziós modellel már lehetőség nyílik a behajláson alapuló rétegvastagságszámítás algoritmusának összeállítására. Az algoritmus főbb lépései a következők:
1. lépés: az inercia pont \( (r_cD_c) \) meghatározása a behajlási teknőből. Ha a behajlási teknőnek nincsen egyértelmű maximuma az r vs. rD síkon, akkor az inercia pont helyzetét a fúrt magminták alapján becsüljük meg.
2. lépés: az inerciapontot behelyettesítjük az (5) egyenletbe, és kiszámítjuk a keresett földműmodulus értéket \( (E_{sg}) \).
3. lépés: a rétegvastagságok K arányát felvesszük a tervek vagy a burkolatfeltárások alapján.
4. lépés: a GPR-modellel megbecsüljük a teljes H pályaszerkezetvastagságot.
5. lépés: a \( h_1 \) és \( h_2 \) rétegvastagságokat kiszámítjuk a teljes H pályaszerkezetvastagság és a K arányszám alapján: \( h_1\ =\ KH\ /\ (K\ +\ 1)\ \) és \( h_2=\ H\ /\ (K\ +\ 1) \).
Összefoglalás
A behajlási teknő hagyományos megközelítésű felhasználása során a gyakorlatban a rétegmodulusok visszaszámítására szorítkozunk, hangsúlyozva, hogy ebben az esetben alapvető input adat a rétegvastagság, amelyet vagy fúrt mintavétellel, vagy talajradar adatokból nyerhetünk. A fentiekben bemutattuk egy olyan számítási eljárás elvi alapjait, aminek a segítségével a roncsolásmentes FWD berendezéssel rögzített behajlásadatokból kiindulva lehetővé válik a rétegvastagságok visszaszámítása is. Mivel sokszor az FWD és a GPR berendezések nem állnak egyszerre rendelkezésre, az ilyen irányú kutatás gyakorlati jelentősége nem elhanyagolható. A kidolgozott módszer az inerciapont elvén alapul és nem csak a teljes pályaszerkezeti vastagságot, hanem minden ejtési pontban az összes aszfalt vastagságot is megadja. A javasolt módszer ugyan nem tisztán roncsolásmentes, mivel magmintavétellel határozza meg a rétegvastagság arányokat, és az egyes rétegek anyagát, azonban a szokás fúrt mintavételi gyakorisággal szemben minden ejtési pontban szolgáltat adatot.
Köszönetnyilvánítás
A kutatásban alkalmazott GPR rendszert a RODEN Mérnöki Iroda Kft. biztosította a 2018-1.1.2-KFI-2018-00029 projekt keretében, amelyet az Innovációs és Technológiai Minisztérium Nemzeti Kutatási, Fejlesztési és Innovációs Hivatal – Nemzeti Kutatási, Fejlesztési és Innovációs Alap támogatott.
Irodalomjegyzék
[1]: Goel, A. & Animesh, D. 2008: Nondestructive Testing of Asphalt Pavements for Structural Condition Evaluation: A State of the Art, Nondestructive Testing and Evaluation 23 (2): 121–40. https://doi.org/10/fdtqhf
[2]: Ahmed, M., R. Tarefder, & A. Maji. 2014: Variation of FWD Modulus Due to Incorporation of GPR Predicted Laye Thicknesses. In Proceedings of the 15th International Conference on Ground Penetrating Radar, 345–50. Brussels: IEEE. https://doi.org/10/ghdkst
[3]: Borecky, V., Frantisek, H., Salih, S. Artagan, & Ladislav, R. 2019: Analysis of GPR and FWD Data Dependency Based on Road Test Field Surveys, Materials Evaluation 77 (2): 12.
[4]: Fuentes, L., K. Taborda, Xiaodi, H., E. Horak, Tao, B. & Lubinda F. W. 2020: A Probabilistic Approach to Detect Structural Problems in Flexible Pavement Sections at Network Level Assessment. International Journal of Pavement Engineering, október, 1–14. https://doi.org/10/gk5v2x
[5]: Maser, K. R. & T. Scullion 1992: Automated Pavement Subsurface Profiling Using Radar: Case Studies of Four Experimental Field Sites. Transportation Research Record 1344: 148–54.
[6]: Noureldin, A. Samy. 1992: New Scenario for Backcakulation of Layer Moduli of Flexible Pavements, In Strength and Deformation Characteristics of Pavement Structures, 1384:23–28. Transportation Research Record. Transportation Research Board. http://onlinepubs.trb.org/Onlinepubs/trr/1993/1384/1384-004.pdf
[7]: Noureldin, A. Samy, & E. A. Sharaf. 1992: A Simplified Mechanistic Algorithm for Pavement Analysis. In Traffic Operations, szerkesztette National Research Council (U.S.), 157. Transportation Research Record 1360. Washington, D.C: Transportation Research Board.
[8]: Noureldin, A. Samy, Karen, Z. Dwayne, H. & Shuo, L. 2005: Non-Destructive Estimation of Pavement Thickness, Structural Number and Subgrade Resilience along INDOT Highways. FHWA/IN/JTRP-2004/35, 2408. West Lafayette, IN: Purdue University. https://doi.org/10.5703/1288284313281
[9]: Morgan, J. R., & A. J. Scala. 1965: Deflections in Flexible Pavements, Australian Road Research 2 (5): 12–26.
[10]: Burmister, D. M. 1943: The Theory of Stresses and Displacements in Layered Systems and Applications to the Design of Airport Runways. In HRB Proceeding, 23:126–49. Highway Research Board.
[11]: Odemark, Nils. 1949: Investigations as to the Elastic Properties of Soils and Design of Pavements According to the Theory of Elasticity (Undersökning av elasticitesegenskaperna hos olika jordarter samt teori för beräkning av beläggningar enligt elasticitetsteorin). Meddelande 77. Stockholm: Statens Väginstitut. http://books.google.com/books?id=m7H2OQAACAAJ
[12]: Barber, E. S. 1940: Discussion on Flexible Surfaces, In Proceedings of the Twentieth Annual Meeting of the Highway Research Board Held at Washington, D.C., 20:330–31. Highway Research Board Proceedings. Highway Research Board.
[13]: Rada, G. R., M. W. Witczak, & S. D. Rabinow. 1988: Comparison of AASHTO Structural Evaluation Techniques Using Nondestructive Deflection Testing, Transportation Research Record, sz. 1207: 134–44.
[14]: Officials, Transportation. 1993. AASHTO Guide for Design of Pavement Structures. Köt. 1. AASHTO.
[15]: Sun, L., Yoshitaka H. & Zukang Yao 1995: Concrete Pavement Layer Moduli Based on Stable Deflection. Doboku Gakkai Ronbunshu 1995 (526): 143–49. https://doi.org/10/dtq9wj
[16]: Li, S., Feng, L., Xinquan, X. & Hao, L. 2017: Inertial Point Influencing Factors Analysis of the Flexible Pavement Structure Under the Moving Load. In 030005. Busan, South Korea. https://doi.org/10/gfwn9g
[17]: Zhang, X. & Lijun, S. 2004: Novel Method for Backcalculation of Asphalt Pavement Moduli. Transportation Research Record: Journal of the Transportation Research Board 1869 (1): 67–72. https://doi.org/10/dvf99w
[18]: Zang, G., Lijun, S. & Zhang, C. 2017: Back-Calculating Method for Subgrade Modulus Based on Virtual Inertial Points. Journal of Southeast University (Natural Science Edition) 47 (6): 1227–32. https://doi.org/10/gfwn97
[19]: Plati, C., A. Loizos, & K. Gkyrtis: 2020: Integration of Non-Destructive Testing Methods to Assess Asphalt Pavement Thickness. NDT & E International 115 (október): 102292. https://doi.org/10/ghcrx7
[20]: S. Mehmet, & Serdal, T. 2004: Backcalculation of Pavement Layer Parameters Using Artificial Neural Networks. Indian Journal of Engineering & Materials Sciences 11 (2): 38–42.
[21]: Terzi, S., Mehmet, S., E. U. Küçüksille & M. Karaşahin 2013: Backcalculation of Pavement Layer Thickness Using Data Mining. Neural Computing and Applications 23 (5): 1369–79. https://doi.org/10/f5cftx
[22]: Tarefder, R. A., Sanjida, A. & Mesbah U. Ahmed. 2015: Neural Network–Based Thickness Determination Model to Improve Backcalculation of Layer Moduli without Coring. International Journal of Geomechanics 15 (3): 04014058. https://doi.org/10.1061/(ASCE)GM.1943-5622.0000407
[23]: Skar, A. & S. Andersen 2020: ALVA: An Adaptive MATLAB Package for Layered Viscoelastic Analysis. Journal of Open Source Software 5 (55): 2548. https://doi.org/10/ghwzq3
[24]: Primusz, P., Péterfalvi, J., Markó, G. & Tóth, Cs. 2015: Effect of Pavement Stiffness on the Shape of Deflection Bowl, Acta Silvatica et Lignaria Hungarica 11 (1): 39–54. https://doi.org/10/ggtcr7
[25]: Rasmussen, C. E. & C. K. I. Williams 2006: Gaussian Processes for Machine Learning. Adaptive computation and machine learning. Cambridge, Mass: MIT Press. http://www.gaussianprocess.org/gpml/chapters/RW.pdf
[26]: Schulz, E., M. Speekenbrink & A. Krause. 2018: A Tutorial on Gaussian Process Regression: Modelling, Exploring, and Exploiting Functions. Journal of Mathematical Psychology 85: 1–16. https://doi.org/10/gfvkt8
Erre a szövegre így hivatkozhat:
Primusz Péter és Tóth Csaba: Virtuális inerciapont módszeren alapuló útpályaszerkezet diagnosztikai eljárás elméleti alapjainak kidolgozása, 2023, DOI: 10.36246/UL.2023.2.04